


Intro
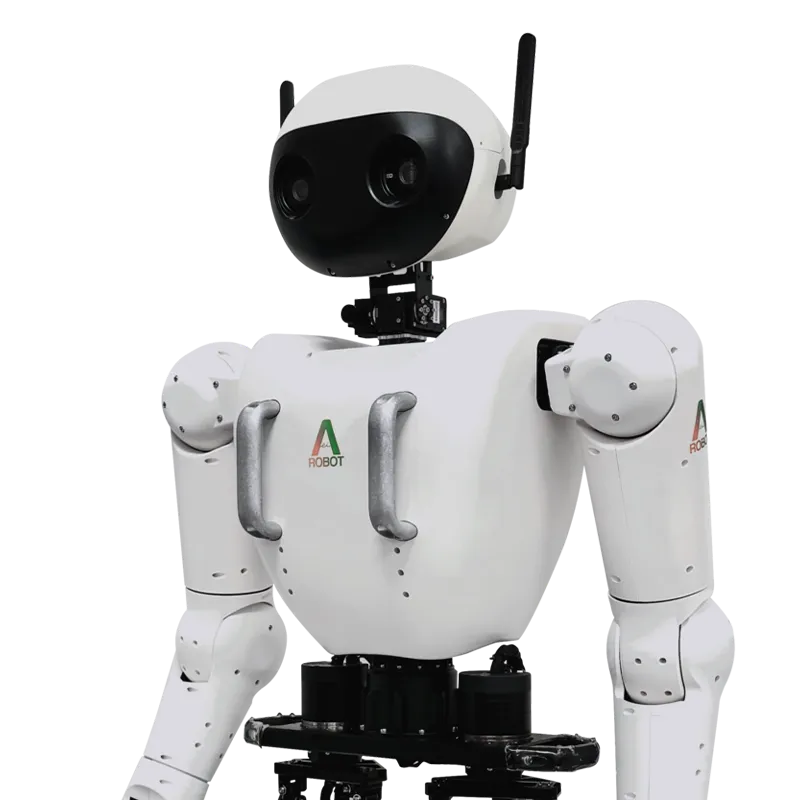
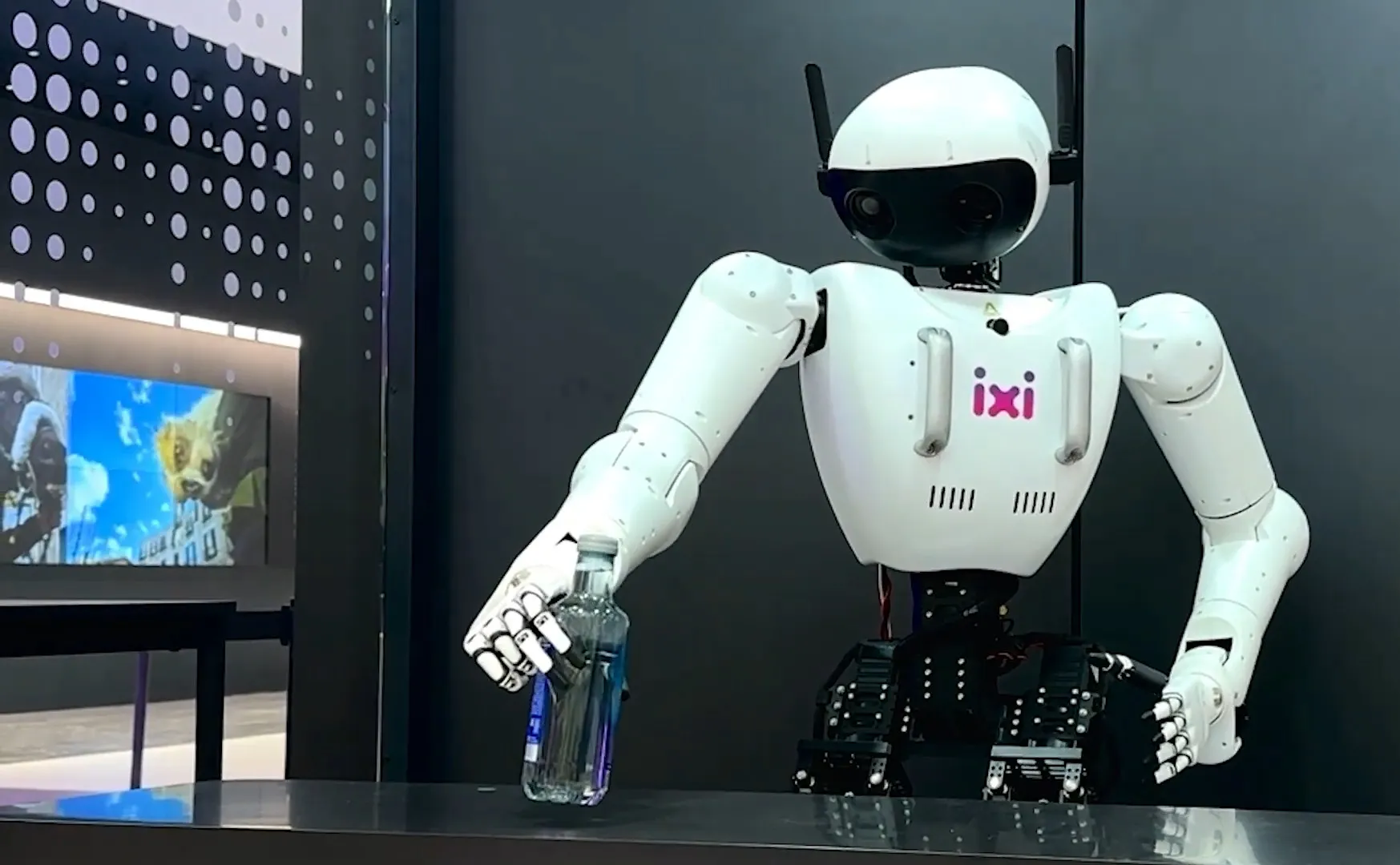
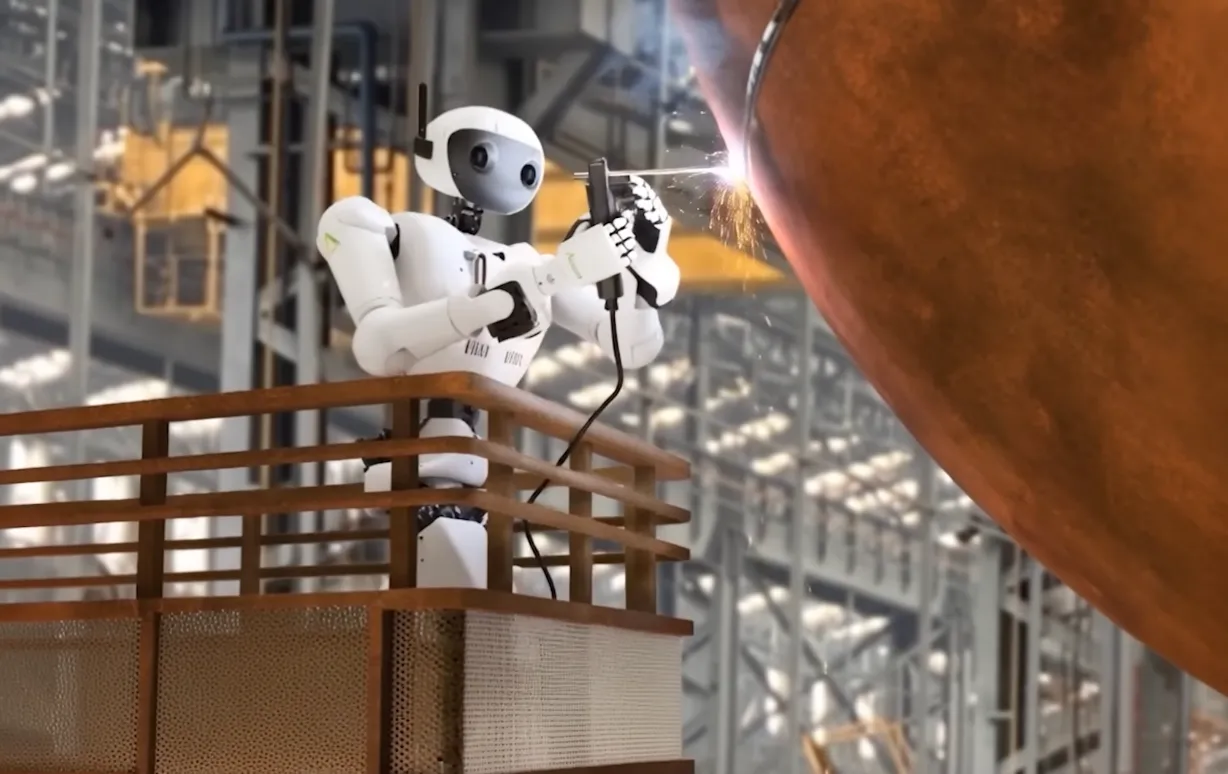
ALICE 4 stands 160 cm tall and weighs approximately 45 kg. Its 41 degrees of freedom are distributed as: 6 DoF per leg (12 total) for bipedal locomotion including stair climbing and navigation on uneven terrain; 7 DoF per arm (14 total) for humanlike reach and manipulation; 1 DoF at the waist for torso rotation; 2 DoF in the head for perception and interaction; and 6 DoF per hand (12 total) for dexterous object handling. All joints are powered by AeiRobot's proprietary linear actuators, developed entirely in-house without reduction gears. These actuators are highly sensitive to current, back-drivable, and operate with a low reduction ratio that minimises inertia and mechanical noise. The integrated heatsink frame and thermal management system within each actuator dissipate motor-generated heat passively, enabling sustained operation under load. Dedicated motor drivers enable real-time Field-Oriented Control (FOC) for precise torque management across all joints.
The onboard compute architecture consists of two modules operating in parallel: an Intel Core i7-1370PE processor (6 performance cores + 8 efficiency cores, 20 threads, 1.90 GHz base, 28 W TDP) handling real-time motion control, and an NVIDIA Jetson Orin NX module managing perception, vision-based AI inference, and object detection pipelines. This split-compute design allows the control loop and AI workflows to run independently, improving system stability and responsiveness. The sensor suite includes a stereo depth camera for 3D environment perception, a 6-axis IMU for balance and movement monitoring, and custom foot contact sensors (Force Sensing Resistors) for proprioceptive ground interaction feedback. A URDF model is available for download from the AeiRobot developer site, supporting simulation and development integration.